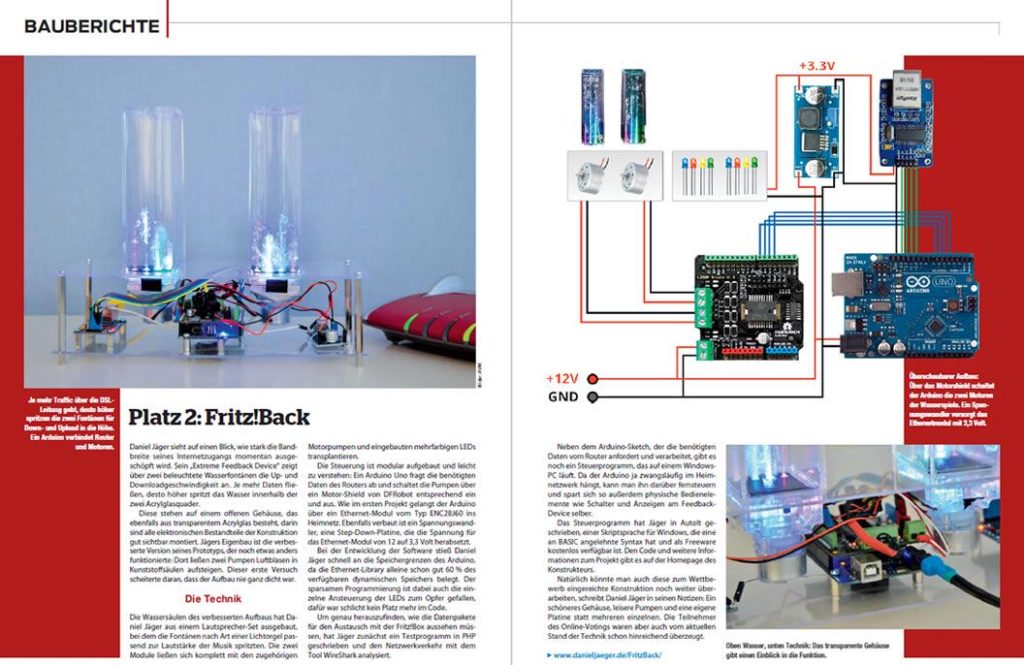
Fritz!Back – Extreme Feedback Device
Bei diesem Projekt handelte es sich um einen Wettbewerbs-Beitrag zum „Pimp your Fritz!“-Wettbewerb von AVM im Jahr 2016. Mein Beitrag hat den 2. Platz gewonnen – ausgelobt waren dafür Flugtickets nach Berlin zur Maker Faire sowie ein Oszilloskop.
https://www.heise.de/make/meldung/AVM-Wettbewerb-Pimp-your-Fritz-Das-sind-die-Gewinner-2823669.html
Die ursprüngliche, komplette Projekt-Dokumentation ist noch online, unter: http://danieljaeger.de/FritzBack/
Bauteile
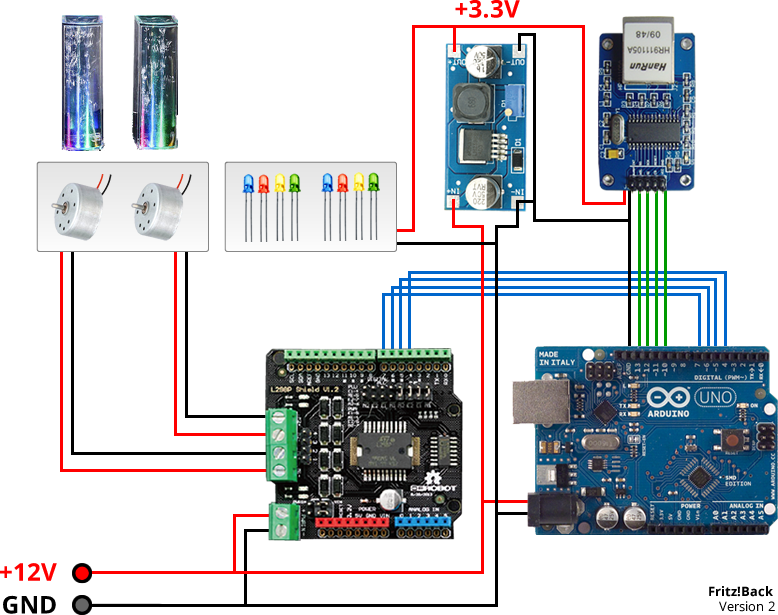
Die Wassersäulen sind aus zwei Lautsprechern ausgebaut, das Plexiglas für die Gehäuseteile gab es günstig im Baumarkt.
• Arduino Uno R3
• DFRobot Motor-Shield
• ENC28J60 Ethernet-Modul
• Step-Down-Modul (12V auf 3.3V)
• 12 Volt-Netzteil
• 2 Wassersäulen mit LEDs
• Silikon-Abdichtmasse
• Patchkabel, Kabelbinder, Schrumpfschläuche
• Abstandshalter, Schrauben und Muttern, Lüsterklemme
Technik
Ursprünglich wurden zwei 12V-Pumpen über ein Motor-Shield des Arduinos(basierend auf dem L298P-Motor-Treiber) per PWM gesteuert. Diese wurdenzusätzlich über zwei Magnetventile verschlossen, um zu verhindern, dass beiausgeschaltetem Gerät Wasser in die Pumpen zurückfließt. Da diese jedochnicht zuverlässig geschlossen haben, wurden sie durch einfache Rückschlagventile aus Aquarien-Pumpen ersetzt.
In der finalen und geschlossenen Variante befindet sich der Motor innerhalb des mit nur sehr wenig Wasser gefülltem Kunststoffgehäuses, welches vier kleine Wasserfontänen erzeugt.

Prozessor
Als Rechenprozessor kommt der ATmega328 eines Arduino Unos zum Einsatz. Speicher und RAM reichen gerade so, um zu zeigen, wie effizient so eine 8-Bit-Architektur und ein 16 MHz-Takt noch sein kann. Anfangs hatte ich die Idee auf ein Raspberry-Pi zurückzugreifen – da man aber das WLAN nur mit vorheriger Konfiguration an neuen Einsatzorten verwenden kann, und man aufeinen einzigen echten PWM-Ausgang beschränkt ist, sowie die Rechenleistungdafür eigentlich „zu hoch“ war, entschied ich mich für die Low-Cost-Variantedes Arduinos – zusätzlich wurden hier etwa 450 mA Leistung eingespart.

Netzwerk
Der Netzwerk-Chip auf einem externen Modul besteht aus einem über SPI angebundenen ENC28J60. Da dieser Chip mit 3.3 Volt versorgt werden muss,und eine Spitzenstromstärke von bis zu 200 mA benötigt (der 3.3V-Pin des Arduinos liefert maximal 50 mA) wurde ein Step-Down-Modul verwendet, welches die benötigte Spannung aus der 12 Volt Eingangsspannung erzeugt.
Pin-Belegung
Die ersten beiden Pins sind für die serielle Datenübertragung reserviert, die Motorsteuerung läuft über Pin 4 bis 7 und das SPI-Interface befindet sich aufden Pins 10 bis 13. Auf den PWM-Pins 3 und 9 waren in der ursprünglichen Version die roten und auf den Pins 2 und 8 die grünen LEDs.